7.Moveit!的介绍和简单使用¶
7.1.Moveit! 运动规划框架介绍¶
在实现机械臂的自主抓取中机械臂的运动规划是其中最重要的一部分,其中包含运动学正逆解算、碰撞检测、环境感知和动作规划等。Gauss机械臂的运动规划采用的是ROS系统提供的MoveIt! 规划。
MoveIt! 是ROS系统中集合了与移动操作相关的组件包的运动规划库。它包含了运动规划中所需要的大部分功能,同时其提供友好的配置和调试界面便于完成机器人在ROS系统上的初始化及调试,其具体架构如下图所示:

(1)move_group: move_group是MoveIt!的核心部分,它的功能在于集成机器人的各独立模块并为用户提供一系列的动作指令和服务。其本身并不具备太多的功能,起到的是积分器的作用,完成各功能包和插件的集成。
(2)场景规划(Planning Scene): 通过场景规划,用户可以创建一个具体的工作环境或者加入障碍物。
(3)运动规划(motion panning): 在MoveIt!中,运动规划器起的作用是实现运动规划算法,其以插件的方式通过ROS的pluginlib接口完成信息的通讯,根据需求可制作或选用不同的规划算法。
(4)运动学(Kinematics): 运动学算法是机械臂控制算法中的核心内容,其中包括正运动学算法和逆运动学算法,在MoveIt!中,运动学算法同样以插件的形式完成于ROS的集成,因此可根据实际需求,编写自己的运动学算法来控制机器人。
(5)碰撞检测(collision checking): 为避免机器人自身或者和环境发生干涉导致意外的发生,在进行运动规划时碰撞检测是必不可少的一部分,在MoveIt!中,采用FCL(Flexible Collision Library)进行对象碰撞的运算。
(6)开源运动规划库(open motion planning library): OMPL是一个的开源的C++库,主要用于运动规划,其中包含了大量用于运动规划的先进算法。该库中的算法以采样规划算法为主,通过其可以实现不同目标点之间的路径规划。
7.2.Moveit! 助手¶
Moveit!的配置助手可以将编写好的urdf文件生成srdf文件,并从而生成Moveit!的功能包。
启动Moveit!助手:
roslaunch moveit_setup_assistant setup_assistant.launch
Moveit!配置助手界面如下图所示:

选择编辑已存在的Moveit!配置包
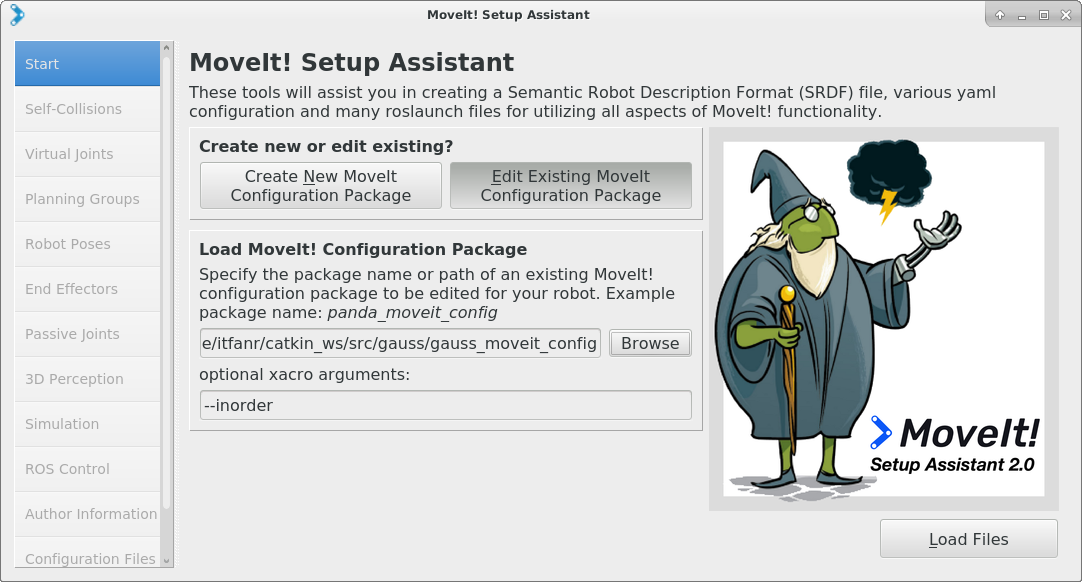
配置加载完毕

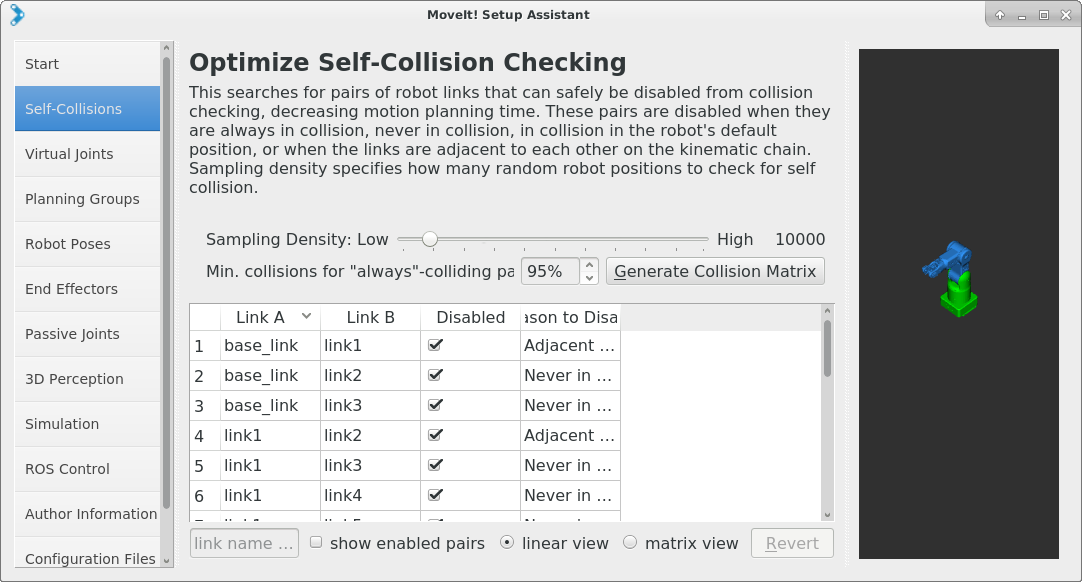
生成碰撞矩阵
MoveIt!可以让我们设置一定数量的随机采样点,根据这些点生成配装参数,可想而知,过多的点会造成运算速度慢,过少的点会导致参数不完善,默认的采样点数量是10000个。
官方称经过实践,要获得不错的效果,10000是最低要求,我们就按照这个默认值生成碰撞矩阵。
碰撞矩阵列出了所有不能相互碰撞的杆件,例如,由于运动关系约束,机器人手腕不能与基座产生碰撞。当涉及到机器人运动规划的时候,不检查这些连接对于碰撞的影响,节省CPU运行时间,提高检测效率。
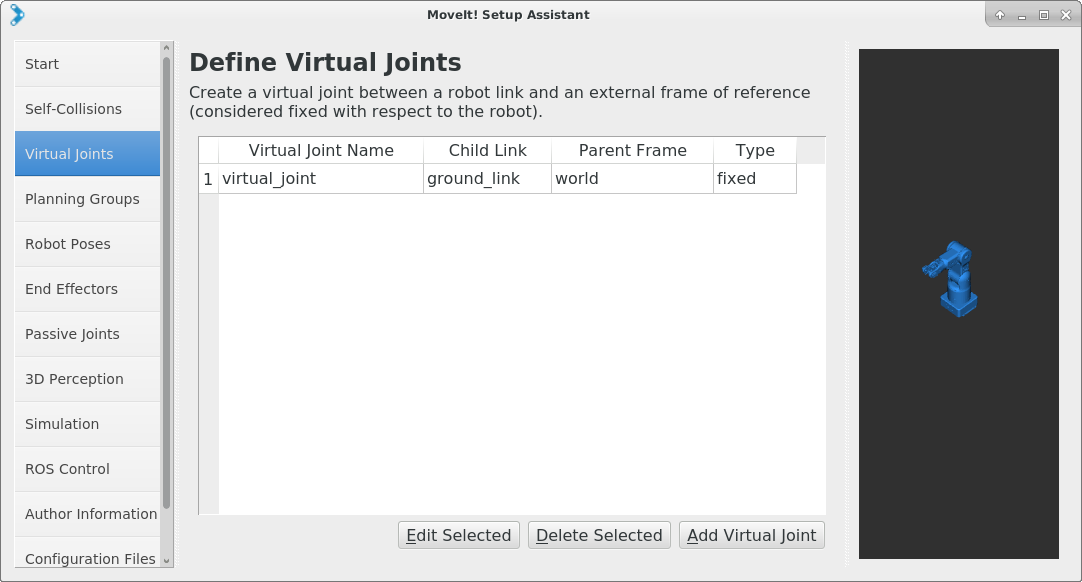
虚拟关节
虚拟关节主要是用来描述机器人在world坐标系下的位置,如果机器人是移动的,虚拟关节可以与移动基座关联,不过一般的机械臂都是固定不动的,所以也可以不需要虚拟关节。
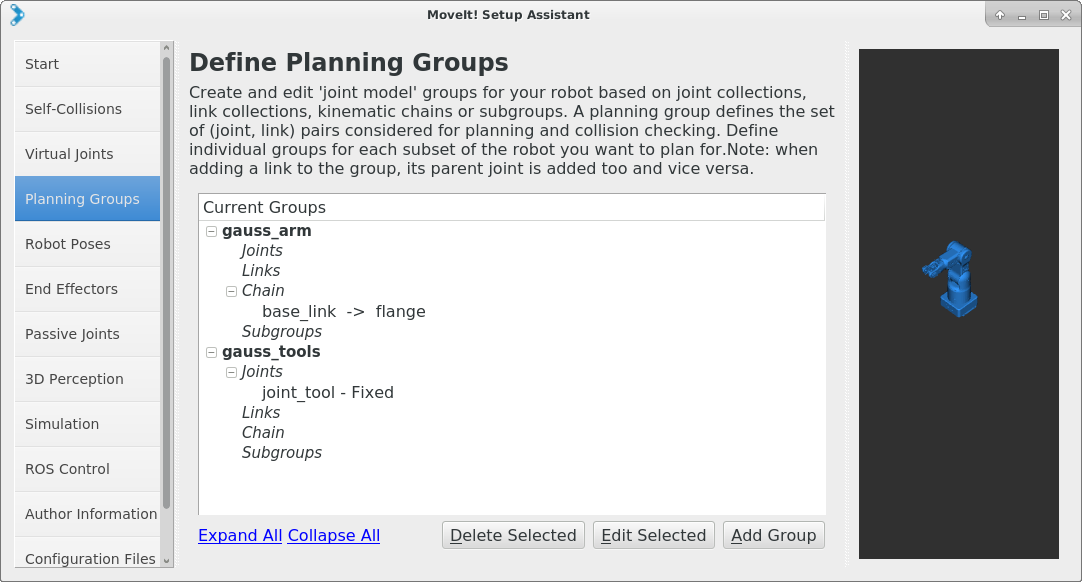
规划组
这一步可以将机器人的多个组成部分(links,joints)集成到一个组当中,运动规划会针对一组links或joints完成运动规划,在配置个过程中还可以选择运动学解析器( kinematic solver)。
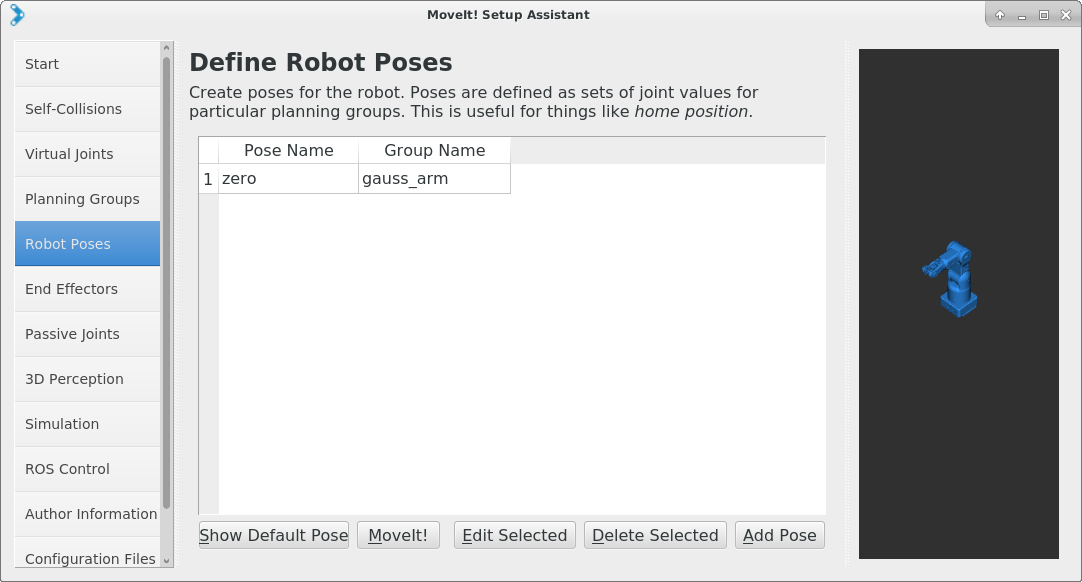
定义机器人位姿
这里可以设置一些固定的位置,比如说机器人的零点位置、初始位置等等,当然这些位置是用户根据场景自定义的,不一定要和机器人本身的零点位置、初始位置相同。这样做的好处就是我们使用MoveIt!的API编程时,可以直接调用这些位置。
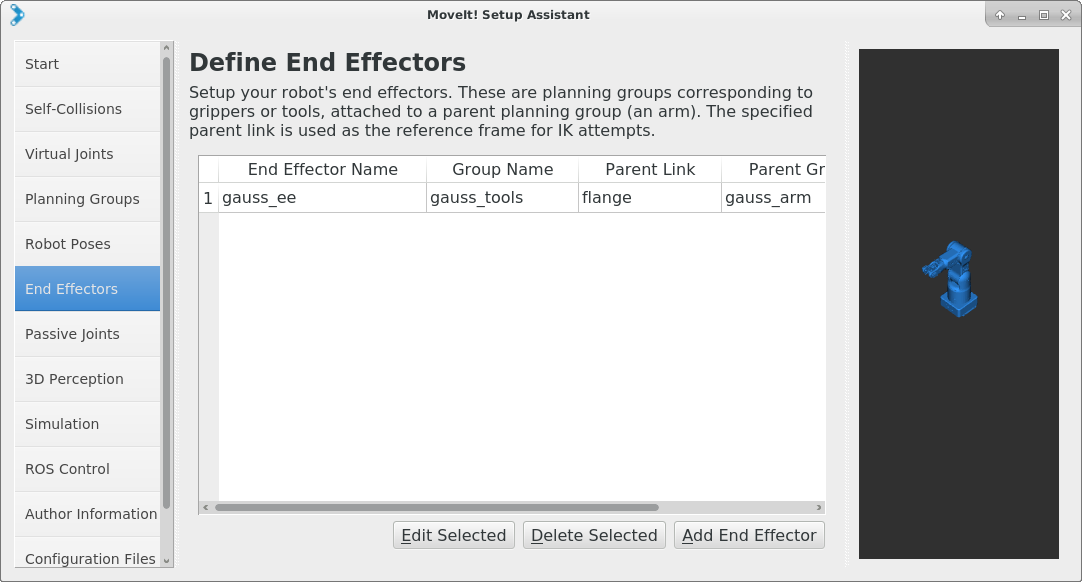
定义末端执行器
机械臂在一些实用场景下,会安装夹具等终端结构,可以在这一步中添加。
定义被动关节
机器人上的某些关节,可能在规划、控制过程中使用不到,可以先声明出来,这里没有就不用管了。

生成配置文件

7.3.Moveit! 的基本接口及使用¶
Moveit的接口在 move_group。
MoveGroupCommander 类常用的api列表如下:
- get_current_joint_values
- set_joint_value_target
- get_current_pose
- set_pose_target
- plan
- compute_cartesian_path
- go
- set_max_velocity_scaling_factor
- set_max_acceleration_scaling_factor
- execute
- set_path_constraints
#!/usr/bin/env python
import sys
import copy
import rospy
import moveit_commander
import moveit_msgs.msg
import geometry_msgs.msg
print "============ Starting tutorial setup"
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('move_group_python_interface_tutorial',
anonymous=True)
robot = moveit_commander.RobotCommander()
group = moveit_commander.MoveGroupCommander("gauss_arm")
print "============ planning frame Reference frame: %s" % group.get_planning_frame()
print "============ end effector Reference frame: %s" % group.get_end_effector_link()
print "============ Printing robot state"
print robot.get_current_state()
group_variable_values = group.get_current_joint_values()
print "============ Joint values: ", group_variable_values
group_variable_values[0] = 1.0
group.set_joint_value_target(group_variable_values)
plan = group.plan()
rospy.sleep(5)
group.go(wait=True)
print "move complete"
参考:
- https://moveit.ros.org/documentation/planners/
- http://moveit.ros.org/documentation/
- http://moveit.ros.org/documentation/concepts/
- https://blog.csdn.net/kalenee/article/details/80818658
- http://ompl.kavrakilab.org/planners.html
- https://www.ncnynl.com/archives/201610/1030.html
- https://blog.csdn.net/wxflamy/article/details/79171337
- https://blog.csdn.net/wxflamy/article/details/79160781
- https://github.com/ros-planning/moveit
- http://docs.ros.org/kinetic/api/moveit_tutorials/html/
- http://docs.ros.org/kinetic/api/moveit_commander/html/index.html
- https://moveit.ros.org/robots/