8.Rviz仿真和URDF模型¶
8.1 ROS的URDF描述格式¶
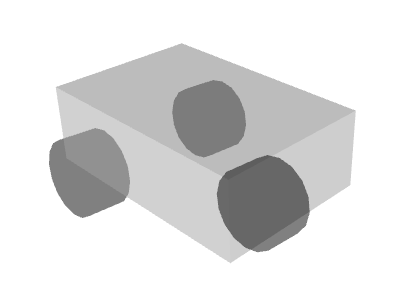
在 ROS 中,用来描述机器人及其部件的为 URDF 模型,即“统一机器人描述格式 (URDF, Unified Robot Description Format)”。例如,将tr10底盘用下图所示的简易的 机器人底盘模型进行描述,该模型车身用立方体描述,三个轮子用圆柱体描述,这样用4 个基本形状就可以描述一个简易的机器人底盘。
采用 URDF 描述文件对上述简易版的 TR10 机器人模型进行描述,文件内容为:
<robot name="abel05">
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
<link name="wheel_1">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0 0.1 0"/>
<material name="black">
<color rgba="0 0 0 1"/>
</material>
</visual>
</link>
<link name="wheel_2">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="-0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<link name="wheel_3">
<visual>
<geometry>
<cylinder length="0.05" radius="0.05"/>
</geometry>
<origin rpy="0 1.5 0" xyz="0.1 -0.1 0"/>
<material name="black"/>
</visual>
</link>
<joint name="joint_base_wheel1" type="fixed">
<parent link="base_link"/>
<child link="wheel_1"/>
</joint>
<joint name="joint_base_wheel2" type="fixed">
<parent link="base_link"/>
<child link="wheel_2"/>
</joint>
<joint name="joint_base_wheel3" type="fixed">
<parent link="base_link"/>
<child link="wheel_3"/>
</joint>
</robot>
其中,link表示一个形状(如圆柱、立方体或其它不规则几何体)。 joint为连接link之间的关节,并指定了旋转轴。
由于 ROS 开发时都需要在工作区下进行,所以先建立一个 ROS 工作区,之后所有 的文件都在此工作区下进行。打开终端,创建 ROS 工作区和包:
$ cd
$ mkdir -p sim_ws/src
$ cd sim_ws/src
$ catkin create pkg tr10_description
$ cd tr10_description
$ mkdir urdf
$ cd urdf
然后在 urdf 文件夹下新建 tr10.urdf 文件,内容如上述源代码的内容,描述了一个 简易版的 tr10 机器人底盘模型。
sim_ws #工作区目录
|--src #源代码目录
|--tr10_description #tr10_description 包目录
|--CMakeLists.txt
|--package.xml
|--urdf #urdf 描述文件目录
|--tr10.urdf
依次执行以下指令,编译工作区,并将工作区导出到环境变量:
$ cd ~/sim_ws
$ catkin_make
$ echo "source ~/sim_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
此时,可利用 roslaunch 工具启动 RViz 工具,预览上述 URDF 模型:
$ roslaunch urdf_tutorial display.launch model:=`rospack find tr10_description`/urdf/tr10.urdf
调节关节位置,观察模型变化。

动手操作:修改URDF模型内容,并RViz可视化工具观察模型变化。
8.2 Gauss机械臂URDF¶
Gauss机械臂的URDF描述文件在gauss_description包中。 描述文件为urdf包下的gauss.urdf.xacro。
gauss_description包在gauss源代码仓库下,gauss托管下载地址为https://github.com/tonyrobotics/gauss。 下载后,将其中的gauss_description包拷贝到本地的~/sim_ws/src/源码文件夹下。
其中xacro文件与urdf文件类似,实质上是一样的。 xacro提供了一种更丰富的描述方式,比如可以定义宏,进行模块化便于重用。
可以看到,其中描述各个部件形状的<geometry>标签不再是圆柱、立方体等标准模型了, 而是描述机械臂每个模块的描述文件,通常用.stl文件或.dae文件描述,此处为.stl文件。
进入urdf文件,运行RViz可视化工具进行查看。
$ roslaunch urdf_tutorial display.launch model:=gauss.urdf.xacro
