2. 高斯机械臂的软件架构¶
2.1.软件架构¶
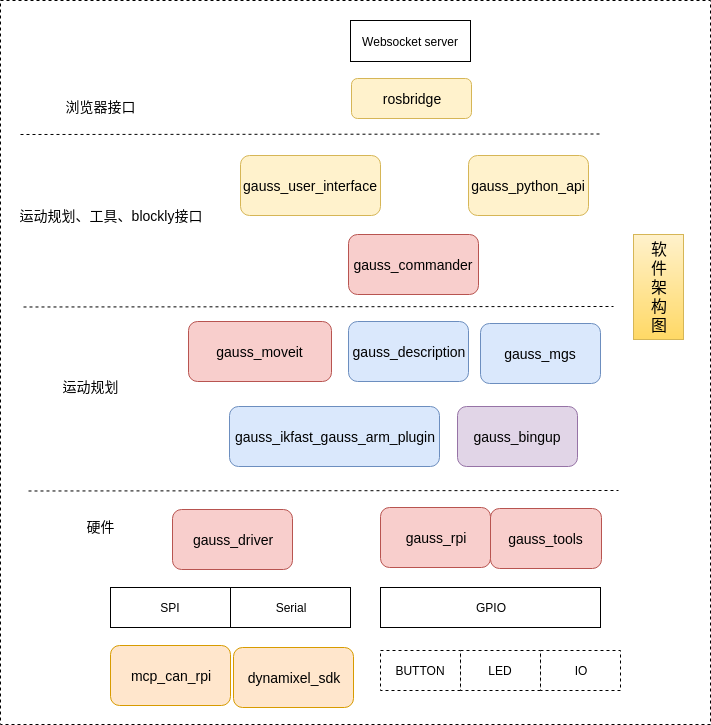
上图为高斯机械臂的软件架构图。
1、圆角矩形为 ROS Package (ROS软件包),gauss_commander、gauss_moveit、gauss_driver、gauss_rpi、gauss_tools为核心包。
gauss_python_api 提供Python api,gauss_user_interface提供blockly功能和手柄功能,gauss_userinterface的功能实现基本是调用了gauss_python_api实现的。
2、白色矩形为各个ROS包实现的功能,如gauss_driver 通过mcp_can_api和dynamixelsdk实现了SPI通信和串口通信。gaussrpi和gauss_tools通过GPIO实现了按钮、LED、工具控制等功能。
3、蓝色矩形为其他功能包,gauss_ikfast_gauss_arm_plugin为运动学逆解插件,gauss_msgs为自定义的ROS消息,gauss_description为机械臂的URDF描述文件等。
4、紫色矩形 gauss_bringup 为整个机械臂的入库文件以及全局的配置文件,可以通过这个功能包一键启动所有功能包、启动gauss_driver等。
2.2.ros_control¶
ROS中提供了丰富的机器人应用:SLAM、导航、MoveIt……但是你可能一直有一个疑问,这些功能包到底应该怎么样用到我们的机器人上,也就是说在应用和实际机器人或者机器人仿真器之间,缺少一个连接两者的东西。
ros_control就是ROS为用户提供的应用与机器人之间的中间件,包含一系列控制器接口、传动装置接口、硬件接口、控制器工具箱等等,可以帮助机器人应用快速落地,提高开发效率。

参考: